
Autonomous Excavators
Rugged AI Compute for Autonomous Heavy Equipment Autonomous excavators and heavy machines need reliable compute for perception, positioning, path planning, and hydraulic control in demanding ...

Autonomous Forklift
Autonomous Forklift AI Compute & Control Autonomous forklifts rely on perception, localization, path planning, and vehicle control to operate safely in warehouses and industrial sites. ...

Lightweight Edge AI Compute for Autonomous Drones
Lightweight Edge AI Compute for Autonomous Drones Autonomous drones need compact, power-efficient compute for vision perception, navigation, obstacle avoidance, and real-time decision-making. MScape enables onboard ...

Autonomous Compute for Container Transport Vehicles
Autonomous Compute for Container Transport Vehicles Unmanned container transport vehicles need reliable compute for multi-sensor perception, route planning, vehicle control, and yard-level autonomous operation. MScape ...
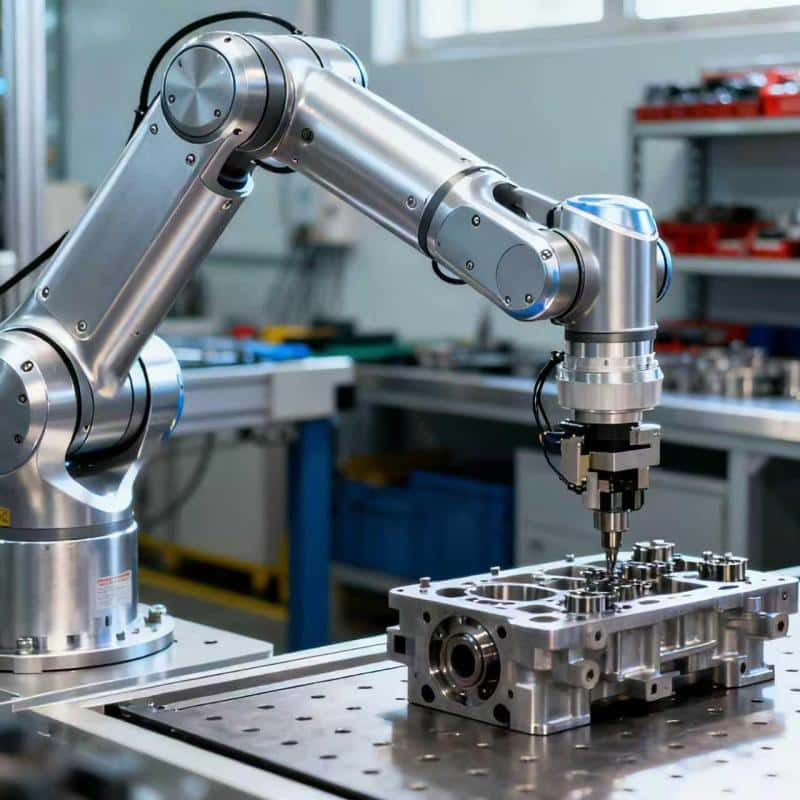
AI Vision & Control for Collaborative Robots
AI Vision & Control for Collaborative Robots Collaborative robots are moving from fixed repetitive motion to adaptive, vision-guided production workflows. MScape supports robot-side AI perception, ...

Wheeled Humanoid Robot Compute Platforms
Wheeled Humanoid Robot Compute Platforms Wheeled humanoid robots combine mobile navigation, upper-body interaction, vision perception, and real-time control in one system. MScape provides robot-side compute ...

Quadruped Robots
Quadruped Robot Compute & Motion Control Quadruped robots require low-latency compute for perception, balance, navigation, and legged locomotion across changing terrain. MScape integrates edge AI ...
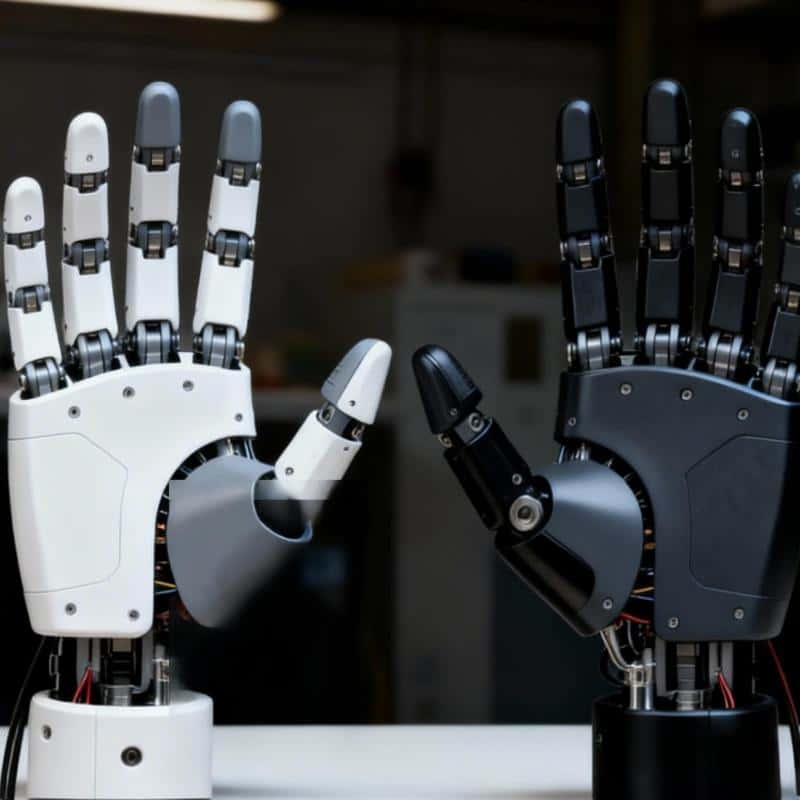
Dexterous Robot Hand Control Platform
Dexterous Robot Hand Control Platform High-DOF robot hands need fast motor response, tactile feedback, and synchronized sensor processing close to the joints. MScape helps developers ...

Bipedal / Humanoid Robots
Bipedal / Humanoid Robot AI Compute & Control Bipedal and humanoid robots need robot-side intelligence that fits inside tight mechanical spaces while still supporting perception, ...